 客服热线:
客服热线:学习“磁场检测式传感器工作原理”前,回顾磁场检测式传感器在扭矩转换环节,将转向扭杆变形量Φ转换为磁通量B,然后由不同原理的电子元件检测出磁通量B的变化,最终转换为电信号输出。
根据电子元件原理不同,可分为以下3中形式:霍尔元件式、巨磁元件式(MR)和PCB板式。
一、霍尔元件式
1.霍尔原理
在均匀强磁场 B 中放入一块板状金属导体,并与磁场 B 方向垂直,如下图1,在金属板中沿与磁场 B 垂直的方向通以电流 I 的时候,在金属板上下表面之间会出现横向电势差 UH,这种现象称为霍尔效应,电势差 UH 称为霍尔电势差。(霍尔片由多种半导体材料制作,如 Ge、Si、InSb、GaAs、InAs、InAsP 以及多层半导体异质结构量子阱材料等)。
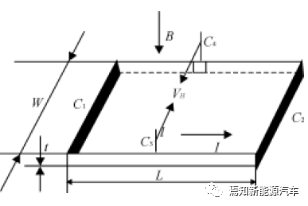
图 1 霍尔原理
2.检测原理
当施加转向力矩时,扭杆会产生扭转变形,输入轴和输出轴的相对角度等于扭杆变形角度:
扭矩传感器的磁极和磁感应单元分别装在输入轴和输出轴上,磁极与磁感应单元的相对位置随扭杆变形的角度变化,磁感应单元感应的磁感应强度B也随之变化;
基于霍尔效应,Hall-IC将磁感应强度B转换为霍尔电压输出:
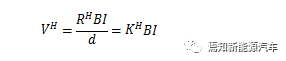
上式中,I为流过半导体横截面的电流,d为半导体厚度,RH为霍尔系数,KH为霍尔原件的灵敏度。
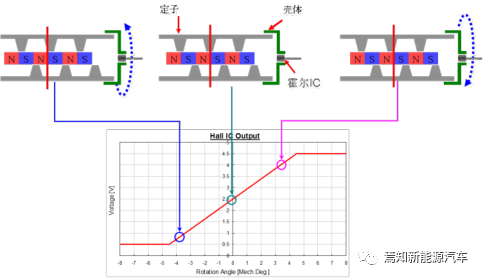
图 2 检测机制
布置方式可分为径向布置和轴向布置两种方式,见下图3。

图 3 霍尔原件式传感器布置方式
二、巨磁元件式
1.巨磁电阻(MR)效应
指某些磁性或合金材料的磁电阻在一定磁场作用下急剧减小,而Δr/r急剧增大的特性,一般增大的幅度比通常的磁性与合金材料的磁电阻约高 10 倍。(巨磁传感器材料:Fe/Cr、FeMn/FeNi/Cu/FeNi、Fe-Co、AMnO 3 )。
2.检测原理
如下图3所示,将GMR元件放在磁化2极磁轮的侧面,由于旋转磁场的变化,引起GMR元件内部Δr变化,从而检测出旋转磁铁的位置,也就是扭杆的角度。
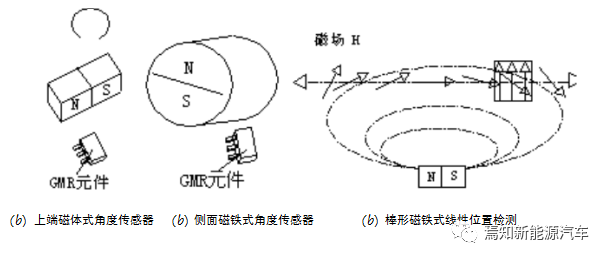
图 4 霍尔原件式传感器布置方式
三、PCB板式
1.结构
PCB 板传感器是磁场检测原理传感器的一种,通过 PCB 板激励线圈产生磁场,由转子的不同位置反应出当前扭杆上下部分的角度,最终在 PCB 板接收线圈产生感应电流,见下图4、图5。
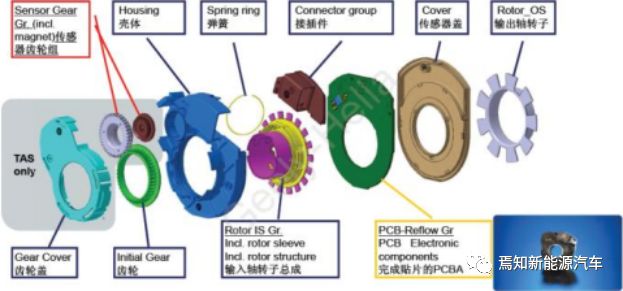
图 5 TAS传感器爆炸图
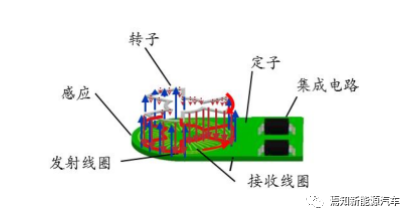
图 6 PCB板结构
2.检测原理
集成电路传递交流电给发射线圈 → 通过电磁感应在转子中产生感应电流→ 接收线圈产生感应电动势 → 接收线圈的感应电流(3 对)提供给集成电路 1 和 2 → 集成电路计算转子位置 → 数据传送到 ECU。动作图见下图7。
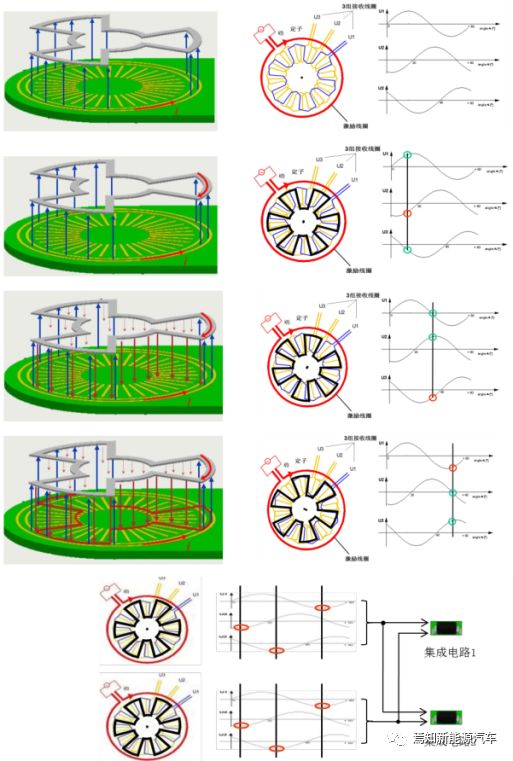
图 7 动作图
输出信号见下图8。
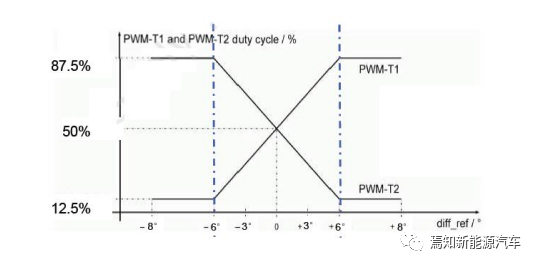
图 8 输出信号
系列推荐
EPS传感器系列 更新中请持续关注
加入“智能网联汽车前沿技术”探讨
免费”报名参会!返回搜狐,查看更多
责任编辑:
了解更多请登陆 配电柜 http://3683.bidadk.com/













